11 KiB
MimiClaw: $5 芯片上的口袋 AI 助理

![]()
![]()
$5 芯片上的 AI 助理(OpenClaw)。没有 Linux,没有 Node.js,纯 C。
MimiClaw 把一块小小的 ESP32-S3 开发板变成你的私人 AI 助理。插上 USB 供电,连上 WiFi,通过 Telegram 跟它对话 — 它能处理你丢给它的任何任务,还会随时间积累本地记忆不断进化 — 全部跑在一颗拇指大小的芯片上。
认识 MimiClaw
- 小巧 — 没有 Linux,没有 Node.js,没有臃肿依赖 — 纯 C
- 好用 — 在 Telegram 发消息,剩下的它来搞定
- 忠诚 — 从记忆中学习,跨重启也不会忘
- 能干 — USB 供电,0.5W,24/7 运行
- 可爱 — 一块 ESP32-S3 开发板,$5,没了
工作原理

你在 Telegram 发一条消息,ESP32-S3 通过 WiFi 收到后送进 Agent 循环 — LLM 思考、调用工具、读取记忆 — 再把回复发回来。同时支持 Anthropic (Claude) 和 OpenAI (GPT) 两种提供商,运行时可切换。一切都跑在一颗 $5 的芯片上,所有数据存在本地 Flash。
快速开始
你需要
- 一块 ESP32-S3 开发板,16MB Flash + 8MB PSRAM(如小智 AI 开发板,~¥30)
- 一根 USB Type-C 数据线
- 一个 Telegram Bot Token — 在 Telegram 找 @BotFather 创建
- 一个 Anthropic API Key — 从 console.anthropic.com 获取,或一个 OpenAI API Key — 从 platform.openai.com 获取
安装
# 需要先安装 ESP-IDF v5.5+:
# https://docs.espressif.com/projects/esp-idf/en/v5.5.2/esp32s3/get-started/
git clone https://github.com/memovai/mimiclaw.git
cd mimiclaw
idf.py set-target esp32s3
Ubuntu 安装
建议基线:
- Ubuntu 22.04/24.04
- Python >= 3.10
- CMake >= 3.16
- Ninja >= 1.10
- Git >= 2.34
- flex >= 2.6
- bison >= 3.8
- gperf >= 3.1
- dfu-util >= 0.11
libusb-1.0-0、libffi-dev、libssl-dev
Ubuntu 安装与构建:
sudo apt-get update
sudo apt-get install -y git wget flex bison gperf python3 python3-pip python3-venv \
cmake ninja-build ccache libffi-dev libssl-dev dfu-util libusb-1.0-0
./scripts/setup_idf_ubuntu.sh
./scripts/build_ubuntu.sh
macOS 安装
建议基线:
- macOS 12/13/14
- Xcode Command Line Tools
- Homebrew
- Python >= 3.10
- CMake >= 3.16
- Ninja >= 1.10
- Git >= 2.34
- flex >= 2.6
- bison >= 3.8
- gperf >= 3.1
- dfu-util >= 0.11
libusb、libffi、openssl
macOS 安装与构建:
xcode-select --install
/bin/bash -c "$(curl -fsSL https://raw.githubusercontent.com/Homebrew/install/HEAD/install.sh)"
./scripts/setup_idf_macos.sh
./scripts/build_macos.sh
配置
MimiClaw 使用两层配置:mimi_secrets.h 提供编译时默认值,串口 CLI 可在运行时覆盖。CLI 设置的值存在 NVS Flash 中,优先级高于编译时值。
cp main/mimi_secrets.h.example main/mimi_secrets.h
编辑 main/mimi_secrets.h:
#define MIMI_SECRET_WIFI_SSID "你的WiFi名"
#define MIMI_SECRET_WIFI_PASS "你的WiFi密码"
#define MIMI_SECRET_TG_TOKEN "123456:ABC-DEF1234ghIkl-zyx57W2v1u123ew11"
#define MIMI_SECRET_API_KEY "sk-ant-api03-xxxxx"
#define MIMI_SECRET_MODEL_PROVIDER "anthropic" // "anthropic" 或 "openai"
#define MIMI_SECRET_SEARCH_KEY "" // 可选:Brave Search API key
#define MIMI_SECRET_PROXY_HOST "10.0.0.1" // 可选:代理地址
#define MIMI_SECRET_PROXY_PORT "7897" // 可选:代理端口
然后编译烧录:
# 完整编译(修改 mimi_secrets.h 后必须 fullclean)
idf.py fullclean && idf.py build
# 查找串口
ls /dev/cu.usb* # macOS
ls /dev/ttyACM* # Linux
# 烧录并监控(将 PORT 替换为你的串口)
# USB 转接器:大概率是 /dev/cu.usbmodem11401(macOS)或 /dev/ttyACM0(Linux)
idf.py -p PORT flash monitor
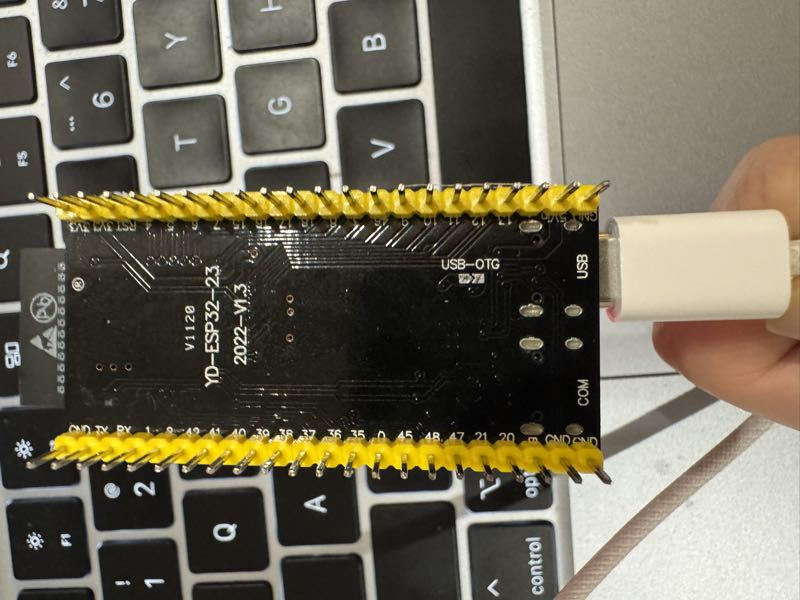
注意:请插对 USB 口! 大多数 ESP32-S3 开发板有两个 Type-C 接口,必须插标有 USB 的那个口(原生 USB Serial/JTAG),不要插标有 COM 的口(外部 UART 桥接)。插错口会导致烧录/监控失败。
查看参考图片

代理配置(国内用户)
在国内需要代理才能访问 Telegram 和 Anthropic API。MimiClaw 内置 HTTP CONNECT 隧道支持。
前提:局域网内有一个支持 HTTP CONNECT 的代理(Clash Verge、V2Ray 等),并开启了「允许局域网连接」。
可以在 mimi_secrets.h 中编译时设置,也可以通过串口 CLI 随时修改:
mimi> set_proxy 192.168.1.83 7897 # 设置代理
mimi> clear_proxy # 清除代理
提示:确保 ESP32-S3 和代理机器在同一局域网。Clash Verge 在「设置 → 允许局域网」中开启。
CLI 命令
通过串口连接即可配置和调试。配置命令让你无需重新编译就能修改设置 — 随时随地插上 USB 线就能改。
运行时配置(存入 NVS,覆盖编译时默认值):
mimi> wifi_set MySSID MyPassword # 换 WiFi
mimi> set_tg_token 123456:ABC... # 换 Telegram Bot Token
mimi> set_api_key sk-ant-api03-... # 换 API Key(Anthropic 或 OpenAI)
mimi> set_model_provider openai # 切换提供商(anthropic|openai)
mimi> set_model gpt-4o # 换模型
mimi> set_proxy 192.168.1.83 7897 # 设置代理
mimi> clear_proxy # 清除代理
mimi> set_search_key BSA... # 设置 Brave Search API Key
mimi> config_show # 查看所有配置(脱敏显示)
mimi> config_reset # 清除 NVS,恢复编译时默认值
调试与运维:
mimi> wifi_status # 连上了吗?
mimi> memory_read # 看看它记住了什么
mimi> memory_write "内容" # 写入 MEMORY.md
mimi> heap_info # 还剩多少内存?
mimi> session_list # 列出所有会话
mimi> session_clear 12345 # 删除一个会话
mimi> heartbeat_trigger # 手动触发一次心跳检查
mimi> cron_start # 立即启动 cron 调度器
mimi> restart # 重启
记忆
MimiClaw 把所有数据存为纯文本文件,可以直接读取和编辑:
| 文件 | 说明 |
|---|---|
SOUL.md |
机器人的人设 — 编辑它来改变行为方式 |
USER.md |
关于你的信息 — 姓名、偏好、语言 |
MEMORY.md |
长期记忆 — 它应该一直记住的事 |
HEARTBEAT.md |
待办清单 — 机器人定期检查并自主执行 |
cron.json |
定时任务 — AI 创建的周期性或一次性任务 |
2026-02-05.md |
每日笔记 — 今天发生了什么 |
tg_12345.jsonl |
聊天记录 — 你和它的对话 |
工具
MimiClaw 同时支持 Anthropic 和 OpenAI 的工具调用 — LLM 在对话中可以调用工具,循环执行直到任务完成(ReAct 模式)。
| 工具 | 说明 |
|---|---|
web_search |
通过 Brave Search API 搜索网页,获取实时信息 |
get_current_time |
通过 HTTP 获取当前日期和时间,并设置系统时钟 |
cron_add |
创建定时或一次性任务(LLM 自主创建 cron 任务) |
cron_list |
列出所有已调度的 cron 任务 |
cron_remove |
按 ID 删除 cron 任务 |
启用网页搜索需要在 mimi_secrets.h 中设置 Brave Search API key(MIMI_SECRET_SEARCH_KEY)。
定时任务(Cron)
MimiClaw 内置 cron 调度器,让 AI 可以自主安排任务。LLM 可以通过 cron_add 工具创建周期性任务("每 N 秒")或一次性任务("在某个时间戳")。任务触发时,消息会注入到 Agent 循环 — AI 自动醒来、处理任务并回复。
任务持久化存储在 SPIFFS(cron.json),重启后不会丢失。典型用途:每日总结、定时提醒、定期巡检。
心跳(Heartbeat)
心跳服务会定期读取 SPIFFS 上的 HEARTBEAT.md,检查是否有待办事项。如果发现未完成的条目(非空行、非标题、非已勾选的 - [x]),就会向 Agent 循环发送提示,让 AI 自主处理。
这让 MimiClaw 变成一个主动型助理 — 把任务写入 HEARTBEAT.md,机器人会在下一次心跳周期自动拾取执行(默认每 30 分钟)。
其他功能
- WebSocket 网关 — 端口 18789,局域网内用任意 WebSocket 客户端连接
- OTA 更新 — WiFi 远程刷固件,无需 USB
- 双核 — 网络 I/O 和 AI 处理分别跑在不同 CPU 核心
- HTTP 代理 — CONNECT 隧道,适配受限网络
- 多提供商 — 同时支持 Anthropic (Claude) 和 OpenAI (GPT),运行时可切换
- 定时任务 — AI 可自主创建周期性和一次性任务,重启后持久保存
- 心跳服务 — 定期检查任务文件,驱动 AI 自主执行
- 工具调用 — ReAct Agent 循环,两种提供商均支持工具调用
开发者
技术细节在 docs/ 文件夹:
- docs/ARCHITECTURE.md — 系统设计、模块划分、任务布局、内存分配、协议、Flash 分区
- docs/TODO.md — 功能差距和路线图
Contributing
Please read docs/CONTRIBUTE.md before opening issues or pull requests.
许可证
MIT
致谢
灵感来自 OpenClaw 和 Nanobot。MimiClaw 为嵌入式硬件重新实现了核心 AI Agent 架构 — 没有 Linux,没有服务器,只有一颗 $5 的芯片。