15 KiB
MimiClaw: $5チップで動くポケットAIアシスタント

![]()
![]()
$5チップ上の世界初のAIアシスタント(OpenClaw)。Linuxなし、Node.jsなし、純粋なCのみ。
MimiClawは小さなESP32-S3ボードをパーソナルAIアシスタントに変えます。USB電源に接続し、WiFiにつなげて、Telegramから話しかけるだけ — どんなタスクも処理し、ローカルメモリで時間とともに成長します — すべて親指サイズのチップ上で。
MimiClawの特徴
- 超小型 — Linux不要、Node.js不要、無駄なし — 純粋なCのみ
- 便利 — Telegramでメッセージを送るだけ、あとはお任せ
- 忠実 — メモリから学習し、再起動しても忘れない
- 省エネ — USB給電、0.5W、24時間365日稼働
- お手頃 — ESP32-S3ボード1枚、$5、それだけ
仕組み

Telegramでメッセージを送ると、ESP32-S3がWiFi経由で受信し、エージェントループに送ります — LLMが思考し、ツールを呼び出し、メモリを読み取り — 返答を送り返します。Anthropic (Claude) と OpenAI (GPT) の両方をサポートし、実行時に切り替え可能です。すべてが$5のチップ上で動作し、データはすべてローカルのFlashに保存されます。
クイックスタート
必要なもの
- ESP32-S3開発ボード(16MB Flash + 8MB PSRAM搭載、例:小智AIボード、約$10)
- USB Type-Cケーブル
- Telegram Botトークン — Telegramで@BotFatherに話しかけて作成
- Anthropic APIキー — console.anthropic.comから取得、または OpenAI APIキー — platform.openai.comから取得
インストール
# まずESP-IDF v5.5+をインストールしてください:
# https://docs.espressif.com/projects/esp-idf/en/v5.5.2/esp32s3/get-started/
git clone https://github.com/memovai/mimiclaw.git
cd mimiclaw
idf.py set-target esp32s3
Ubuntu インストール
推奨ベースライン:
- Ubuntu 22.04/24.04
- Python >= 3.10
- CMake >= 3.16
- Ninja >= 1.10
- Git >= 2.34
- flex >= 2.6
- bison >= 3.8
- gperf >= 3.1
- dfu-util >= 0.11
libusb-1.0-0,libffi-dev,libssl-dev
Ubuntu でのインストールとビルド:
sudo apt-get update
sudo apt-get install -y git wget flex bison gperf python3 python3-pip python3-venv \
cmake ninja-build ccache libffi-dev libssl-dev dfu-util libusb-1.0-0
./scripts/setup_idf_ubuntu.sh
./scripts/build_ubuntu.sh
macOS インストール
推奨ベースライン:
- macOS 12/13/14
- Xcode Command Line Tools
- Homebrew
- Python >= 3.10
- CMake >= 3.16
- Ninja >= 1.10
- Git >= 2.34
- flex >= 2.6
- bison >= 3.8
- gperf >= 3.1
- dfu-util >= 0.11
libusb,libffi,openssl
macOS でのインストールとビルド:
xcode-select --install
/bin/bash -c "$(curl -fsSL https://raw.githubusercontent.com/Homebrew/install/HEAD/install.sh)"
./scripts/setup_idf_macos.sh
./scripts/build_macos.sh
設定
MimiClawは2層設定を採用しています:mimi_secrets.hでビルド時のデフォルト値を設定し、シリアルCLIで実行時にオーバーライドできます。CLI設定値はNVS Flashに保存され、ビルド時の値より優先されます。
cp main/mimi_secrets.h.example main/mimi_secrets.h
main/mimi_secrets.hを編集:
#define MIMI_SECRET_WIFI_SSID "WiFi名"
#define MIMI_SECRET_WIFI_PASS "WiFiパスワード"
#define MIMI_SECRET_TG_TOKEN "123456:ABC-DEF1234ghIkl-zyx57W2v1u123ew11"
#define MIMI_SECRET_API_KEY "sk-ant-api03-xxxxx"
#define MIMI_SECRET_MODEL_PROVIDER "anthropic" // "anthropic" または "openai"
#define MIMI_SECRET_SEARCH_KEY "" // 任意:Brave Search APIキー
#define MIMI_SECRET_TAVILY_KEY "" // 任意:Tavily APIキー(優先)
#define MIMI_SECRET_PROXY_HOST "" // 任意:例 "10.0.0.1"
#define MIMI_SECRET_PROXY_PORT "" // 任意:例 "7897"
ビルドとフラッシュ:
# フルビルド(mimi_secrets.h変更後はfullclean必須)
idf.py fullclean && idf.py build
# シリアルポートを確認
ls /dev/cu.usb* # macOS
ls /dev/ttyACM* # Linux
# フラッシュとモニター(PORTをあなたのポートに置き換え)
# USBアダプタ:おそらく /dev/cu.usbmodem11401(macOS)または /dev/ttyACM0(Linux)
idf.py -p PORT flash monitor
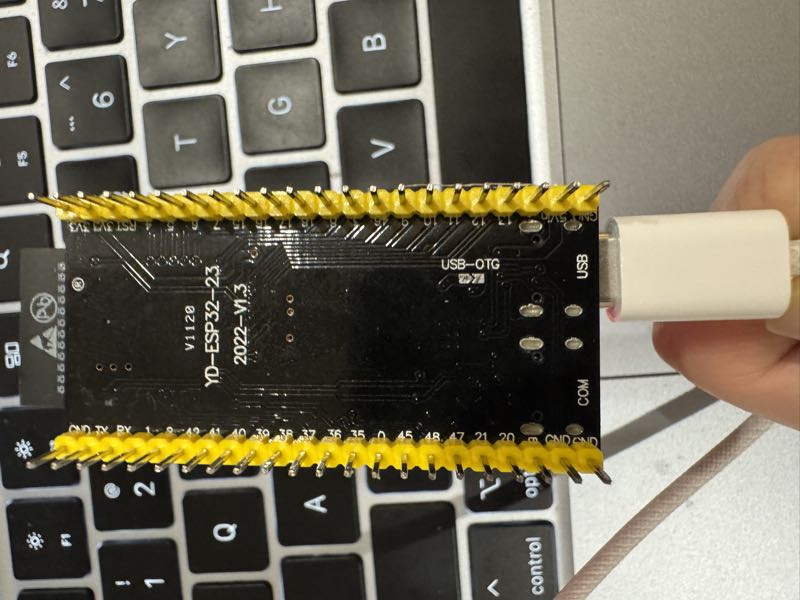
重要:正しいUSBポートに接続してください! ほとんどのESP32-S3ボードには2つのUSB-Cポートがあります。USB(ネイティブUSB Serial/JTAG)と書かれたポートを使用してください。COM(外部UARTブリッジ)と書かれたポートは使わないでください。間違ったポートに接続するとフラッシュ/モニターが失敗します。
参考画像を表示

CLIコマンド(UART/COMポート経由)
シリアル接続で設定やデバッグができます。設定コマンドにより再コンパイル不要で設定変更可能 — USBケーブルを挿すだけ。
実行時設定(NVSに保存、ビルド時のデフォルト値をオーバーライド):
mimi> wifi_set MySSID MyPassword # WiFiネットワークを変更
mimi> set_tg_token 123456:ABC... # Telegram Botトークンを変更
mimi> set_api_key sk-ant-api03-... # APIキーを変更(AnthropicまたはOpenAI)
mimi> set_model_provider openai # プロバイダーを切替(anthropic|openai)
mimi> set_model gpt-4o # LLMモデルを変更
mimi> set_proxy 127.0.0.1 7897 # HTTPプロキシを設定
mimi> clear_proxy # プロキシを削除
mimi> set_search_key BSA... # Brave Search APIキーを設定
mimi> set_tavily_key tvly-... # Tavily APIキーを設定(優先)
mimi> config_show # 全設定を表示(マスク付き)
mimi> config_reset # NVSをクリア、ビルド時デフォルトに戻す
デバッグ・メンテナンス:
mimi> wifi_status # 接続されていますか?
mimi> memory_read # ボットが何を覚えているか確認
mimi> memory_write "内容" # MEMORY.mdに書き込み
mimi> heap_info # 空きRAMはどれくらい?
mimi> session_list # 全チャットセッションを一覧
mimi> session_clear 12345 # 会話を削除
mimi> heartbeat_trigger # ハートビートチェックを手動トリガー
mimi> cron_start # cronスケジューラを今すぐ開始
mimi> restart # 再起動
USB(JTAG)vs UART:どのポートで何をするか
ほとんどの ESP32-S3 開発ボードには 2つの USB-C ポートがあります:
| ポート | 用途 |
|---|---|
| USB(JTAG) | idf.py flash、JTAGデバッグ |
| COM(UART) | REPL CLI、シリアルコンソール |
REPLにはUART(COM)ポートが必要です。 USB(JTAG)ポートは対話的なREPL入力をサポートしません。
ポート詳細と推奨ワークフロー
| ポート | ラベル | プロトコル |
|---|---|---|
| USB | USB / JTAG | ネイティブ USB Serial/JTAG |
| COM | UART / COM | 外部 UART ブリッジ(CP2102/CH340) |
ESP-IDFコンソールはデフォルトでUART出力に設定されています(CONFIG_ESP_CONSOLE_UART_DEFAULT=y)。
両方のポートを同時に接続している場合:
- USB(JTAG)ポートはフラッシュ/ダウンロードを処理し、補助シリアル出力を提供
- UART(COM)ポートはREPL用のメインインタラクティブコンソールを提供
- macOS では両ポートとも
/dev/cu.usbmodem*または/dev/cu.usbserial-*として表示 —ls /dev/cu.usb*で確認 - Linux では USB(JTAG)は通常
/dev/ttyACM0、UART は通常/dev/ttyUSB0
推奨ワークフロー:
# USB(JTAG)ポートでフラッシュ
idf.py -p /dev/cu.usbmodem11401 flash
# UART(COM)ポートでREPLを開く
idf.py -p /dev/cu.usbserial-110 monitor
# または任意のシリアルターミナル:screen、minicom、PuTTY(ボーレート 115200)
メモリ
MimiClawはすべてのデータをプレーンテキストファイルとして保存します。直接読み取り・編集可能です:
| ファイル | 説明 |
|---|---|
SOUL.md |
ボットの性格 — 編集して振る舞いを変更 |
USER.md |
あなたの情報 — 名前、好み、言語 |
MEMORY.md |
長期記憶 — ボットが常に覚えておくべきこと |
HEARTBEAT.md |
タスクリスト — ボットが定期的にチェックして自律的に実行 |
cron.json |
スケジュールジョブ — AIが作成した定期・単発タスク |
2026-02-05.md |
日次メモ — 今日あったこと |
tg_12345.jsonl |
チャット履歴 — ボットとの会話 |
ツール
MimiClawはAnthropicとOpenAI両方のツール呼び出しをサポート — LLMは会話中にツールを呼び出し、タスクが完了するまでループします(ReActパターン)。
| ツール | 説明 |
|---|---|
web_search |
Tavily(優先)またはBraveでウェブ検索し、最新情報を取得 |
get_current_time |
HTTP経由で現在の日時を取得し、システムクロックを設定 |
cron_add |
定期または単発タスクをスケジュール(LLMが自律的にcronジョブを作成) |
cron_list |
スケジュール済みのcronジョブを一覧表示 |
cron_remove |
IDでcronジョブを削除 |
ウェブ検索を有効にするには、mimi_secrets.hでTavily APIキー(優先、MIMI_SECRET_TAVILY_KEY)またはBrave Search APIキー(MIMI_SECRET_SEARCH_KEY)を設定してください。
Cronタスク
MimiClawにはcronスケジューラが内蔵されており、AIが自律的にタスクをスケジュールできます。LLMはcron_addツールで定期ジョブ(「N秒ごと」)や単発ジョブ(「UNIXタイムスタンプで指定」)を作成できます。ジョブが発火すると、メッセージがエージェントループに注入され、AIが起動してタスクを処理・応答します。
ジョブはSPIFFS(cron.json)に永続化され、再起動後も保持されます。活用例:日次サマリー、定期リマインダー、スケジュールチェック。
ハートビート
ハートビートサービスはSPIFFS上のHEARTBEAT.mdを定期的に読み取り、アクション可能なタスクがあるかチェックします。未完了の項目(空行、見出し、チェック済み- [x]以外)が見つかると、エージェントループにプロンプトを送信し、AIが自律的に処理します。
これによりMimiClawはプロアクティブなアシスタントになります — HEARTBEAT.mdにタスクを書き込めば、次のハートビートサイクルで自動的に拾い上げて実行します(デフォルト:30分ごと)。
その他の機能
- WebSocketゲートウェイ — ポート18789、LAN内から任意のWebSocketクライアントで接続
- OTAアップデート — WiFi経由でファームウェア更新、USB不要
- デュアルコア — ネットワークI/OとAI処理が別々のCPUコアで動作
- HTTPプロキシ — CONNECTトンネル対応、制限付きネットワークに対応
- マルチプロバイダー — Anthropic (Claude) と OpenAI (GPT) の両方をサポート、実行時に切り替え可能
- Cronスケジューラ — AIが定期・単発タスクを自律的にスケジュール、再起動後も永続化
- ハートビート — タスクファイルを定期チェックし、AIを自律的に駆動
- ツール呼び出し — ReActエージェントループ、両プロバイダーでツール呼び出し対応
開発者向け
技術的な詳細はdocs/フォルダにあります:
- docs/ARCHITECTURE.md — システム設計、モジュール構成、タスクレイアウト、メモリバジェット、プロトコル、Flashパーティション
- docs/TODO.md — 機能ギャップとロードマップ
- docs/WIFI_ONBOARDING_AP.md — ローカル
MimiClaw-XXXXonboarding / 管理アクセスポイントの使い方 - docs/im-integration/ — IMチャネル統合ガイド(Feishuなど)
貢献
Issue や Pull Request を作成する前に、CONTRIBUTING.md をご確認ください。
コントリビューター
MimiClaw に貢献してくれた皆さんに感謝します。
ライセンス
MIT
謝辞
OpenClawとNanobotにインスパイアされました。MimiClawはコアAIエージェントアーキテクチャを組み込みハードウェア向けに再実装しました — Linuxなし、サーバーなし、$5のチップだけ。